Maxime Zand
Welcome to my portfolio! I’m Maxime, a master’s student studying Robotics and Autonomous Systems at Arizona State University 🔱.
Check out my resumé and portfolio below.
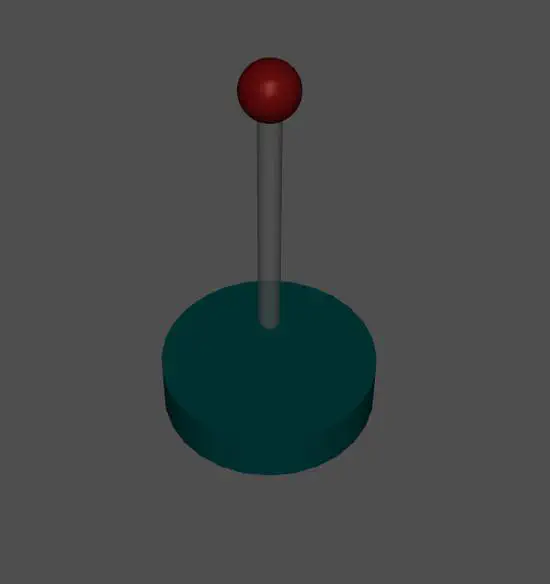
Reinforcement Learning Balance of Inverted Spherical Pendulum on Holonomic Drive
Developed a simulation of an inverted spherical pendulum on a holonomic-driven robot using Gymnasium and MuJoCo. I independently modeled both the system simulation and reward function, achieving realistic and responsive control for this complex environment. The model was trained using Soft Actor-Critic
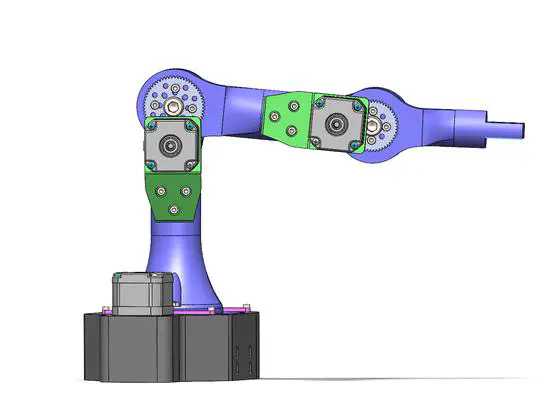
Custom Closed-Loop 3DOF Robot
Collaborated in a team of two to rapidly prototype a 3 DOF robot, designing and 3D printing custom parts in SolidWorks. Built a closed-loop control system using an Arduino Due with stepper motors and magnetic encoders, achieving precise motion control.
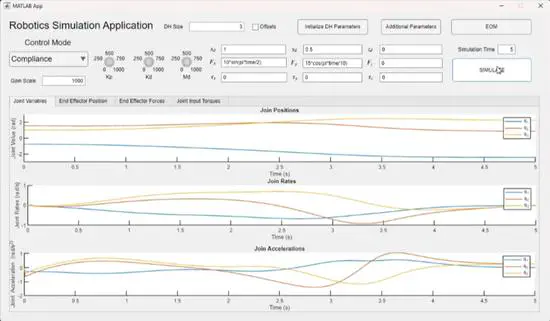
Robotic Manipulator Simulation App
The goal of this project is to create a user-friendly GUI in MATLAB that simulates the force control and dynamics of a robotic arm from the input of DH parameters, masses, gear ratios, etc. The following two assumptions will be made in all following calculations: all the joints are either revolute or prismatic and all the links are straight.
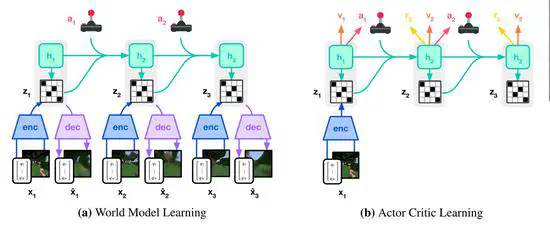
Distilling Symbols from Perceptual World Models
This project distills symbols from the latent vectors learned by Dreamer models. Using a sparse autoencoder, we create binary vectors that potentially map to internal concepts and analyze their alignment with real-world concepts via mutual information. We also explore regularization objectives, inspired by InfoGAN, and propose architectural changes to enhance symbol recovery.
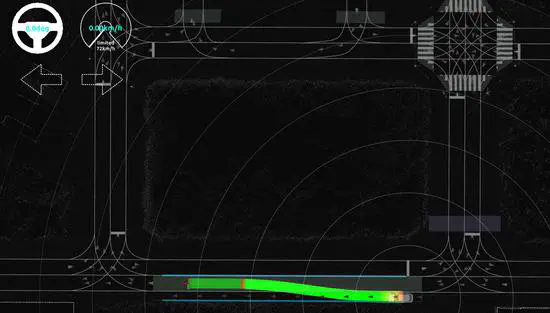
Autoware-Carla Docker Image
Open source contribution. Developed a Docker image for Autoware-Carla OpenPlanner 2.5 bridge developed by Hatem Darweesh in order to simulate and develop autonomous driving systems. Uses a ROS bridge in order to connect Carla Simulator and Autoware autonomous driving agents.
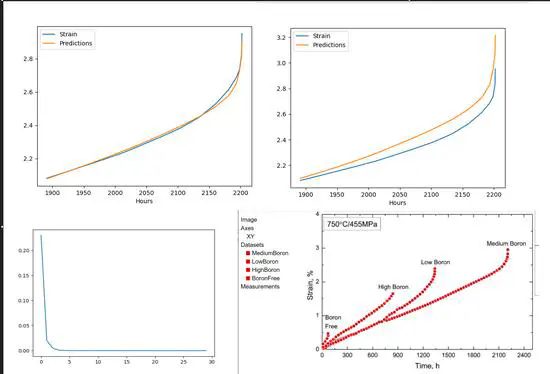
Creep Stress Prediction using LSTM/RNN
Short collaboration with Quantum Mechanical Engineering Laboratory @ ASU. Successfully predicted time series data of creep stress on physical specimen using RNN and LSTM networks. Model uses last 5 points to predict the next. Built using Python and Keras.
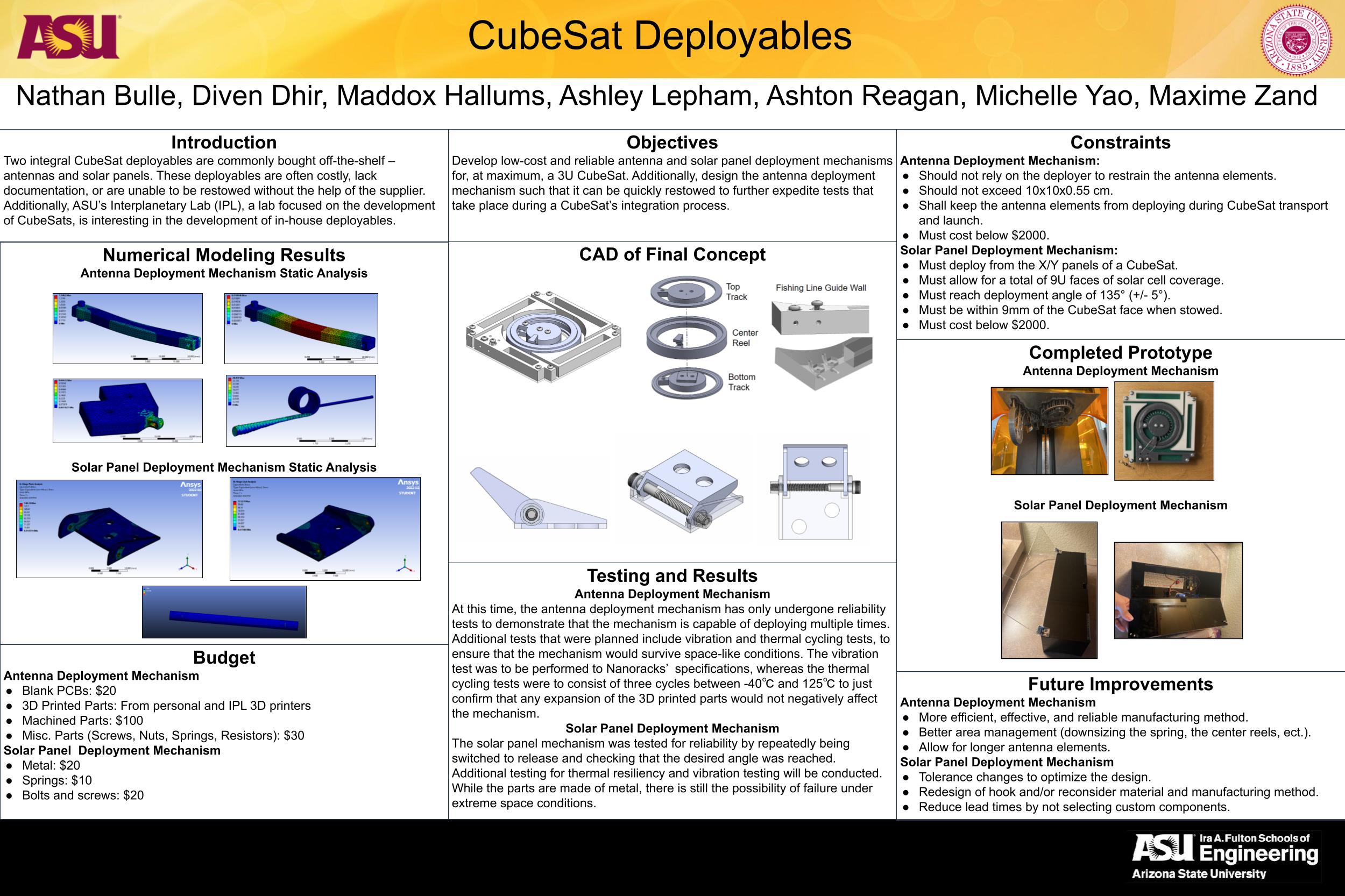
CubeSat Deployables
Mechanical Engineering Senior capstone project with a goal of manufacturing cheaper, easier to user, and re-deployable CubeSat components for better in-house testing.
Conduit
A Windows UWP Application that uses the Bluetooth Classic and Bluetooth Low Eenergy (BLE) Protocol to allow Apple iOS users to receive notifications and take phone calls from Windows devices using the Apple Notification Center Service (ANCS)

Slash-Server
Server for 2D game Slash built using the Godot game engine in GDScript. Server uses a combination of UDP, TCP, and higher level RPC in order to sync player states and world states. Seperate servers for both gateway and authentication were created and accounts were securly stored. All run using an Amazon EC2 instance.